Breaking news
[Back to archive]
The latest results achieved by the project consortium.
Reading out Binocular Energy Population Codes for Short-latency Disparity-vergence Eye Movements
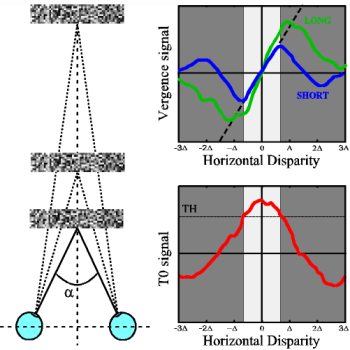
Fig 1: (left) Simulated experimental setup where the eyes verge on planes at different depth. (right) The LONG and SHORT signals used to drive vergence, and the T0 signal to switch between LONG and SHORT modes.
The ability of the human brain to fuse the
images projected on the left
and right retinas, in order to achieve depth perception, depends
directly on
the ability to produce and to keep a stable fixation, i.e. to act as
both the
eyes fixate the same point in the word. This task is carried out by
vergence eye movements (Fig.1 left).
Experimental
evidences show that, although depth perception and vergence eye movements
are
based on the activity of complex cells of the primary visual cortex, the brain adopts specific and separate mechanisms to combine binocular information and carry out the two distinct tasks. We define as fusibility range (FR) the range where a
distributed population of disparity detectors is able to fuse the left
and
right retinal images and hence to compute a disparity map. In each image location
the
decoding of the population can be achieved through a centre of mass
strategy
where each cell response is weighted by its preferred disparity, and
thus
taking a decision on the disparity values. Vergence control models that
are
based on a distributed population of disparity detectors, usually
require
first the computation of the disparity map, thus limiting the
functionality of
the vergence system inside the FR. The model we developed, mimicking
the behaviour of the cells in the Medial
Superior Temporal area [Takemura et al., Journal
of Neurophysiology, 85:2245-2266, 2001], combines the population
responses without
taking a decision, but
extracting a disparity-vergence response that allows us to nullify the
disparity in the fovea, even if the stimulus presented is far beyond
the FR. The
disparity-vergence response is obtained by a weighted sum of the
population
response, where the weights are computed by minimizing a functional
that embeds
two very specific goals: (1) to obtain signals proportional to
horizontal
disparities, (2) to make these signals be insensitive to the presence
of
vertical disparities. The desired feature of the horizontal disparity
tuning
curve for vergence is an odd symmetry with a linear segment passing
smoothly
through zero disparity, which defines a critical servo range over which
changes
in the stimulus horizontal disparity elicit roughly proportional
changes in the
amount of the horizontal vergence angle. On the basis of the Dual Mode
theory
[Hung et al., IEEE Trans. on Biomedical
Engineering, 33:1021-1028, 1986], the model provides two distinct
vergence
control mechanisms: a fast mode enabled in the presence of large
disparities,
and a slow mode enabled in the presence of small disparities (cfr LONG
and
SHORT signals in Fig.1 right). Moreover we extract an additive signal T0,
sensitive
to zero disparity, that automatically switches between LONG and SHORT,
depending on the disparities present in the scene.
The
model, tested in a simple virtual environment characterized by a
frontoparallel
plane with a random dot texture (Fig.1 left), produces the correct change
of
vergence for both a steady plane and a plane moving in depth, even when in the
scene are
present disparities larger than the FR. Thus, the model is able, first, to
bring back
the disparities of the scene inside the FR, in order to grant the
effectiveness
of the disparity map, and then, to keep the fixation point stable on the
surface
of the object in fovea.
A. Gibaldi, M. Chessa, A. Canessa, S.P. Sabatini, F.
Solari
Department of Biophysical and Electronic Engineering
(DIBE), University of Genoa
|
