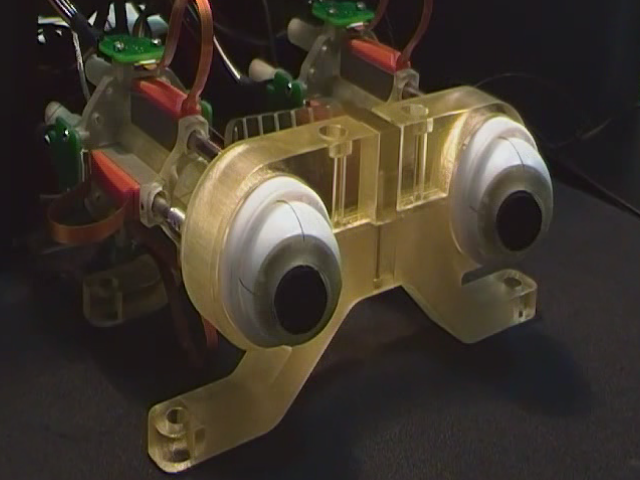
A tendon-driven mechatronic binocular eye system (MAC-EYE II) replicates the biomechanics of ocular motions in humans and primates.
The implementation of a bio-inspired robot head is also the starting point for the analysis and the assessment of the motor control
strategies implemented by the brain to drive the very high dynamics of ocular rotation.
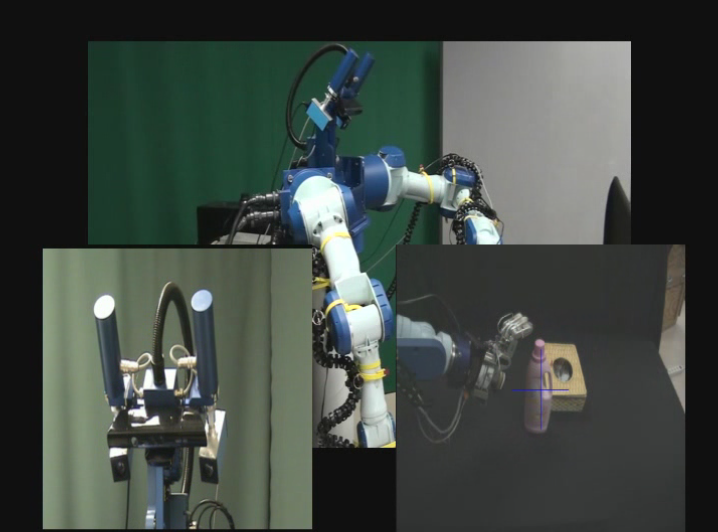
The robotic platform "Tombatossal" is moved by a Vergence Version Control model with Attention effects. The robot is able to distinguish among different objects, to perform an oculomotor action toward the location
of a selected object, and to perform arm reaching movements, either with or without gazing at it.
Research News Archive
The project's gazette on breaking results from the different labs of the consortium
15 Dec 2010 - Reaching Activity in the Medial Posterior Parietal Cortex of Monkeys Is Modulated by Visual Feedback Reaching and grasping an object is an action that we perform succesfully in light and in dark. In the dark, reaching movements rely on efferent copies of motor signals and proprioceptive reafferent signals from the moving limb. However, reaching in the light relies not only on efferent motor and reafferent proprioceptive signals but also on visual information about the target to be reached, the moving forelimb, and the surroundings. In the absence of visual feedback, movement performance quickly deteriorates .
Annalisa Bosco(1), Rossella Breveglieri(1), Eris Chinellato(2),
Claudio Galletti(1), Patrizia Fattori(1),
University of Bologna (1)
Department of Psychology
Universitat Jaume I de Castellon (2)
Department of Engineering and Computer Science
15 Dec 2010 - A Tendon Driven Robot Eye Prototype The MACEYE-II is a bio-inspired stereo-vision robot with the mechanics and motion characteristics of a human eye. This prototype of a robot eye must emulate the mechanical structure and the motions of a human eye with a comparable working range. The inspiration for the design obviously came from the study of the anatomy of the eye in humans and primates.
G. Cannata, A. Trabucco
Department of Communication, Computer and System Science (DIST)
University of Genoa
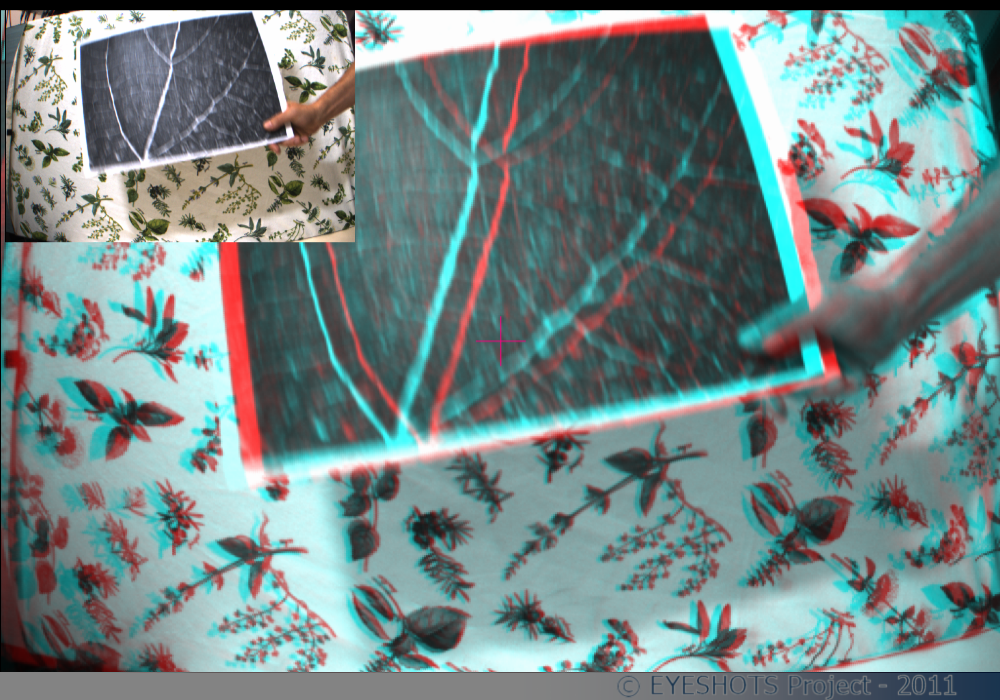
07 May 2010 - Visual feature extraction in foveated systems The log-polar imaging is a well established paradigm for simplifying a wide number of computational problems in active vision, since simultaneously provides a wide field-of-view, high spatial resolution on the fovea, and a significant data reduction. These features are well suitable for visual systems that continuously interact with the environment, by purposefully moving the eyes to bring the interesting objects into the foveas.
M. Chessa, S.P. Sabatini, F. Solari
Department of Biophysical and Electronic Engineering (DIBE)
University of Genoa
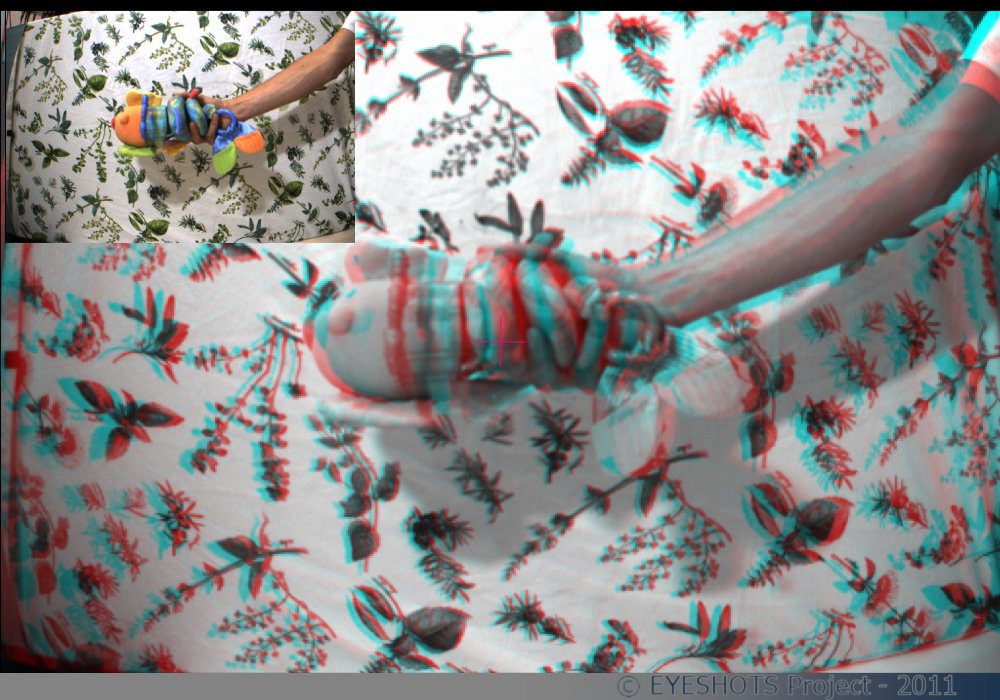
26 April 2010 - Visuomotor spatial awareness through concurrent reach/gaze actions The execution of gazing and reaching movements toward the same target is the fundamental building block for learning to coordinate the processing of visual information with body motor control in natural and artificial agents. Taking inspiration from human and primate studies, we developed a computational framework that allows an artificial agent to learn to interact with objects in its peripersonal space.
Eris Chinellato, Marco Antonelli, Beata Joanna Grzyb, Angel P. del Pobil
Robotic Intelligence Laboratory
Department of Engineering and Computer Science
Universitat Jaume I de Castellon (UJI)
Claudio Galletti(1), Rossella Breveglieri(1), Markus Lappe(2), Annalisa Bosco(1),
Marco Ciavarro(1), Patrizia Fattori(1)
Department of Human and General Physiology
University of Bologna (1)
Department of Psychology
University of Münster (2)
12 April 2010 - Saccadic adapation modifies perceptual localization An experimental modification of the motor control of saccadic eye movements leads to an associated change in the perceived location of objects. The tight agreement between the amount of change of eye movement control and the amount of change of localization shows that perceptual space is shaped by motor knowledge rather than simply constructed from visual input.
Eckart Zimmermann, Markus Lappe
Department of Psychology
University of Münster, Germany
Breveglieri, R.(1), Bosco, A.(1), Canessa, A.(2), Fattori, P.(1), Sabatini, S.P.(2)
Department of Human and General Physiology
University of Bologna (1)
Department of Biophysical and Electronic Engineering (DIBE)
University of Genoa (2)
F.H. Hamker, J. Wiltschut
Department of Psychology
University of Münster (Germany)
24 March 2009 -
Vergence simulator The first version of the vergence simulator is ready. The simulator has been developed as a MATLAB-based platform for vergence control strategies development, modeling and testing. But it also can be used in wide spectrum of tasks, in which 3D modeling is involved, e.g. generation of the synthetic stereo images, computation of the ground truth optical flow, and disparity statistics estimation for the 3D scenes etc.
23 March 2009 -
A Virtual Reality Simulator for Active Vision Systems The novelty of the proposed approach is to use the Virtual Reality as a tool to simulate the behavior of physical systems, in particular of the visual system of a robot, rather than to make the perceptual rendering of the visual information exploitable by human users.
M. Chessa, S.P. Sabatini, F. Solari
Department of Biophysical and Electronic Engineering (DIBE)
University of Genoa